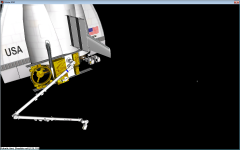
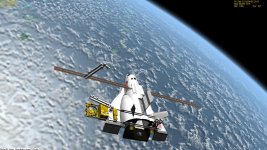
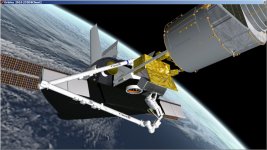
== Vessel class payload ===
[CONFIG]
MESHNAME="Jasonhubble_truss"
SIZE=4
EMPTY_MASS=10
VISIBLE=1
CAMERA=(0,2.3,2)
FOCUS=1
[PARENT_ATTACH_0] ;to Telescope
NAME="Telescope"
POS=(0,-0.257,-4.394)
DIR=(0,1,0)
ROT=(0,0,-1)
LOOSE=0
RANGE =5
[PARENT_ATTACH_1] ;to SSRMS
NAME="SSRMS"
POS=(-0.696,-0.393,-0.928)
DIR=(0,1,0)
ROT=(0,0,-1)
LOOSE=0
RANGE =5
[PARENT_ATTACH_2] ;to COS
NAME="COS"
POS=(0.0,0.266,-2.271)
DIR=(0,-1,0)
ROT=(1,0,0)
LOOSE=0
RANGE =5
[PARENT_ATTACH_3] ;to MFR
NAME="MFR"
POS=(0.977,0.654,-2.69)
DIR=(0,0,1)
ROT=(0,1,0)
LOOSE=0
RANGE =5
[PARENT_ATTACH_4] ;to Spotlight2
NAME="Truss_Spotlight"
POS=(-1.199,0.380,-2.100)
DIR=(0,1,0)
ROT=(0,0,-1)
LOOSE=0
RANGE =5
[CHILD_ATTACH_0] ; attachment point in bay
NAME="Attach"
POS=(0,-0.525,-1.801)
DIR=(0,-1,0)
ROT=(0,0,1)
ID="GS"
[ROBOTIC_ARM]
JOINT_0_NAME="ring pitch up"
JOINT_0_SEQ=0
JOINT_0_RANGE=(0,90)
JOINT_1_NAME="ring rotate"
JOINT_1_SEQ=1
JOINT_1_RANGE=(-87.5,87.5)
GRAP_SEQ=0
GRAP_ATTACH=0
[ANIM_SEQ_0] ;ring pitch up
INIT_POS=0
DURATION=50
[ANIM_SEQ_1] ;ring rotate
INIT_POS=0.5
DURATION=60
[ANIM_SEQ_2] ;HST clamps
KEY=K
DURATION=4
[ANIM_SEQ_3] ;COS open
KEY=G
DURATION=4
;------------------------------------------------------------------------
[ANIM_COMP_0] ;ring pitch up
SEQ=0
GROUPS=10,11,12,13
RANGE=(0,1)
TYPE=ROTATE
ROT_PNT=(0,-0.512,-5.16)
ROT_AXIS=(1,0,0)
ANGLE=-90
PARENT=0
[ANIM_COMP_1] ; ring rotate
SEQ=1
GROUPS=6,7,8,9
RANGE=(0,1)
TYPE=ROTATE
ROT_PNT=(0,-0.831,-4.394)
ROT_AXIS=(0,1,0)
ANGLE=360
PARENT=0
[ANIM_COMP_2] ; tip
SEQ=0
RANGE=(0,1)
TIP_1=(0,-0.257,-4.394)
TIP_2=(0,1.257,-4.394)
TIP_3=(0,-0.257,-3.394)
PARENT=1
[ANIM_COMP_3] ;1male clamp
SEQ=2
GROUPS=4
RANGE=(0,1)
TYPE=ROTATE
ROT_PNT=(-0.781,-0.273,-4.848)
ROT_AXIS=(0.866035,0,0.499983)
ANGLE=60
PARENT=1
[ANIM_COMP_4] ;1 female clamp
SEQ=2
GROUPS=5
RANGE=(0,1)
TYPE=ROTATE
ROT_PNT=(-0.781,-0.273,-4.848)
ROT_AXIS=(0.866035,0,0.499983)
ANGLE=-60
PARENT=1
[ANIM_COMP_5] ;2male clamp
SEQ=2
GROUPS=3
RANGE=(0,1)
TYPE=ROTATE
ROT_PNT=(0.784,-0.273,-4.86)
ROT_AXIS=(-0.86605,0,0.499957)
ANGLE=60
PARENT=1
[ANIM_COMP_6] ;2female clamp
SEQ=2
GROUPS=2
RANGE=(0,1)
TYPE=ROTATE
ROT_PNT=(0.784,-0.273,-4.86)
ROT_AXIS=(-0.86605,0,0.499957)
ANGLE=-60
PARENT=1
[ANIM_COMP_7] ;3male clamp
SEQ=2
GROUPS=0
RANGE=(0,1)
TYPE=ROTATE
ROT_PNT=(-0.004,-0.273,-3.474)
ROT_AXIS=(0,0,1)
ANGLE=-60
PARENT=1
[ANIM_COMP_8] ;3female clamp
SEQ=2
GROUPS=1
RANGE=(0,1)
TYPE=ROTATE
ROT_PNT=(-0.004,-0.273,-3.474)
ROT_AXIS=(0,0,1)
ANGLE=60
PARENT=1
; COS open
[ANIM_COMP_9] ; COS open
SEQ=3
GROUPS=23,24,25,26
RANGE=(0,1)
TYPE=ROTATE
ROT_PNT=(1.016,-0.831,-3.163)
ROT_AXIS=(1,0,0)
ANGLE=110
; payloads
;[PAYLOAD_0]
MESHNAME=RMSstowed
NAME=SSRMSD
OFF=(0.0,0,0)
MASS=10000
MODULE=SSRMSD
SPEED=(0,0,0)
ROT_SPEED=(0,0,0)