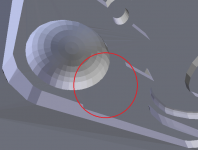
* face missing inboard of salad bowls?
In the highlighted area, should there be a surface, or is it supposed to be open as it is?
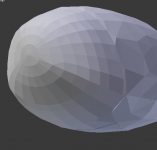
* some kinks and holes around the nose cap, at the 5 and 7 o'clock positions when viewed from the front
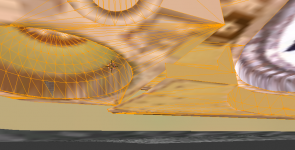
The nose cap looks beautiful, the area immediately behind not so much. Also, note the gap in the NLGD.