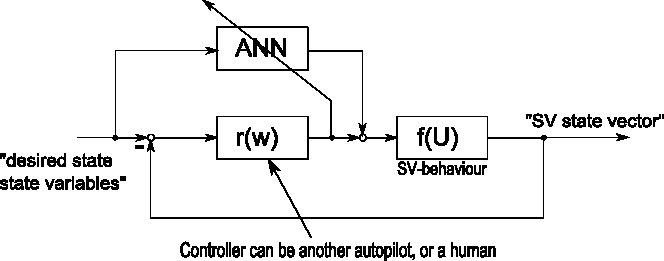
This is an experimental autopilot based on Neural Nets. It is intended to work for every ship and the bilot can learn a behaviour by watching a human pilot doing something.
This is a very early alpha-version to get some feedback about bugs etc only working feature right now is an aittitude-hold-autopilot (but that one works for almost every ship)....Â
Please give me feedback whether your ship works with it, or not.
*Update* I recompiled this Version due to some complaints in the orbiter forum. It appears, that the Neural net libraries were not linked in the code somehow.