@gattispilot : I'm Google-translating some chinese content...
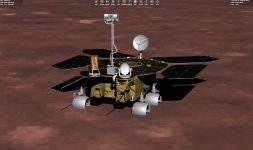
They say that the "middle" solar panels can move up and down to adjust the angle. So when the rover is parked, it can lower the panels on the side to catch a bit more sunlight, then rise them before it resumes roving.
... and there's a flap on the shell, that can be used to adjust the descent angle. So it is some kind of lifting body. Things are getting more and more complex.
... also the lander hovers just 100 meters above ground, and looks for a spot clean of rocks.
They say that the "middle" solar panels can move up and down to adjust the angle. So when the rover is parked, it can lower the panels on the side to catch a bit more sunlight, then rise them before it resumes roving.
... and there's a flap on the shell, that can be used to adjust the descent angle. So it is some kind of lifting body. Things are getting more and more complex.
... also the lander hovers just 100 meters above ground, and looks for a spot clean of rocks.
Last edited:


")
.png")
.png")
.png")
.png")