- Joined
- Aug 5, 2008
- Messages
- 4,261
- Reaction score
- 1
- Points
- 0
From ISS On-Orbit Status Report for 01/02/2011.
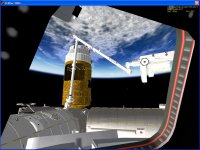
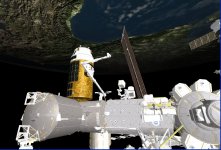
Cady enabled the Cupola RWS (Robotic Workstation) UOP (Utility Outlet Panel) for power-up in Node 3, installed the CCR (Cupola Crew Restraint) and readied the JEM (Japanese Experiment Module) RMS (Remote Manipulator System) equipment in the JPM (JEM Pressurized Module). Cady & Paolo then used the SSRMS (Space Station Remote Manipulator System) to release and extract the EP (Exposed Pallet) from the ULC (Unpressurised Logistics Carrier) in HTV-2's flank (~10:35 AM GMT) and hand it over to the JEM RMS, operated by Scott who berthed it to the JEF (JEM Exposed Facility) EFU-10 (Exposed Facility Unit-10). [The payloads on the EP will be transferred by ground control operations including SPDM (Special Purpose Dexterous Manipulator). Thrusters were inhibited during the transfer activity (7:00 AM to 1:05 PM GMT) due to load constraints.]
Scott afterwards disconnected the UOP DCP (Display & Control Panel) power bypass cable at the Cupola RWS and uninstalled the CCR (which stabilizes crewmembers during robot arm operations).
Working on the newly transferred Japanese KOBAIRO ("stork") rack in the JPM, Cady removed the launch locks on the front panel of the GHF (Gradient Heating Furnace) SCAM (Sample Cartridge Automatic Exchange Mechanism). [GHF is a vacuum furnace that contains three heating blocks. Their positions and temperatures can be independently controlled, and various temperature profiles can be configured. This facility will mainly be used for high quality crystal growth experiments using unidirectional solidification.]
Also transferred from HTV-2 yesterday (instead of today as planned) was the MSPR (Multipurpose Small Payload Rack) which provides a platform to accommodate small experiments. [Electrical power and data communications will be supplied to the individual experiments inserted in the MSPR.]
Cady enabled the Cupola RWS (Robotic Workstation) UOP (Utility Outlet Panel) for power-up in Node 3, installed the CCR (Cupola Crew Restraint) and readied the JEM (Japanese Experiment Module) RMS (Remote Manipulator System) equipment in the JPM (JEM Pressurized Module). Cady & Paolo then used the SSRMS (Space Station Remote Manipulator System) to release and extract the EP (Exposed Pallet) from the ULC (Unpressurised Logistics Carrier) in HTV-2's flank (~10:35 AM GMT) and hand it over to the JEM RMS, operated by Scott who berthed it to the JEF (JEM Exposed Facility) EFU-10 (Exposed Facility Unit-10). [The payloads on the EP will be transferred by ground control operations including SPDM (Special Purpose Dexterous Manipulator). Thrusters were inhibited during the transfer activity (7:00 AM to 1:05 PM GMT) due to load constraints.]
Scott afterwards disconnected the UOP DCP (Display & Control Panel) power bypass cable at the Cupola RWS and uninstalled the CCR (which stabilizes crewmembers during robot arm operations).
Working on the newly transferred Japanese KOBAIRO ("stork") rack in the JPM, Cady removed the launch locks on the front panel of the GHF (Gradient Heating Furnace) SCAM (Sample Cartridge Automatic Exchange Mechanism). [GHF is a vacuum furnace that contains three heating blocks. Their positions and temperatures can be independently controlled, and various temperature profiles can be configured. This facility will mainly be used for high quality crystal growth experiments using unidirectional solidification.]
Also transferred from HTV-2 yesterday (instead of today as planned) was the MSPR (Multipurpose Small Payload Rack) which provides a platform to accommodate small experiments. [Electrical power and data communications will be supplied to the individual experiments inserted in the MSPR.]