I dont know, It sounds like the final product would be pretty flimsy/unwieldy, although it would be kinda funny having a robotic arm twisted all around the station like a vine.
Out of curiosity, what purpose is there to placing a station in GEO?
Thanks for the input and question, I was beginning to wonder if anyone bothered to read the thread...
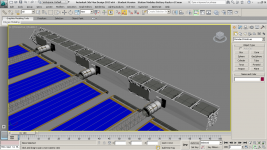
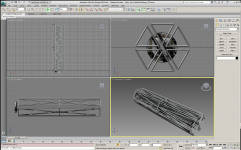
The 100' arm has 9 rotary joints. However unless special circumstances were needed only three of them are enabled at any given time. YOur right it would be interesting to see it twisted around the station modules like a peppermint stripe.
Placing the station in GEO does a couple of things.
The station would get sunlight in varing degrees through about 14 hours of the day, making the heat soak and cold soak in a contigous period instead of six to seven times a day. Stress cycles would be fewer, although they would be deeper. If you have a daylight time longer than the standard shift, then you have a longer window with which to EVA. Segway to EVAs...
EVAs would be commonplace on GWS, two of the large tanks are used to maintain satelites in orbit around earth in any altitude, LEO, Polar, Mid, and additionaly other GEOs. You would have the time to go get, and place these objects in a bay durring the daylight hours, which makes the manuvers a bit easier. The Darkside of the station hours could be placed on the start of an orbit, or the end of an orbit of an object that is out of phase with the station. Yes this is a shorter window, but still longer than a LEO orbit.
The station would be completely out of the shelter of the earths magnetic field, making direct observation of radiation exposure for everything from astronauts to new equipment and old equipment possible on a 24 hour cycle. The station would only pass through a week field while in the dark, and only durring the normal sleep cycle of 2/3 of the crew.
Additionaly it would be a better launching orbit for deep space missions. GWSs last feature is to be a construction platform for Mars missions and eventually other deep space mission.
But probably the best reason is that it has never been done before. NASA(USA) and the other cooperating countries would be intrigued at the least. Or this could be the most disasterous experiment of all. I'm not a PHD so I don't really know.
Great question, Thanks again.